Зачем нужны четвероногие роботы? Пример ANYmal дает ответ на этот вопрос

Мы часто пишем о четвероногих роботах. Сообщаем какие новые функции и возможности они получили и насколько приблизились к своим реальным прототипам.
Но один вопрос всегда оставался нераскрытым до конца: собственно, зачем все эти машины? Помимо потенциала подключения этих роботов к разбору завалов в результате различных чрезвычайных происшествий и катастроф, а также военного использования, как и где еще можно применять подобные четвероногие машины? Недавно Boston Dynamics показала, как один из ее роботов SpotMini проводит инспекцию на строительной площадке. Но это не совсем та ситуация, которая может продемонстрировать превосходство машины над человеком.
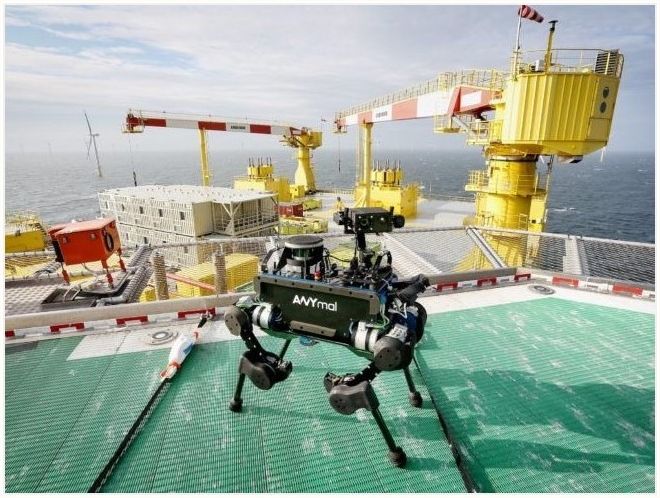
В сентябре этого года компания ANYbotics привезла одного из своих четвероногих роботов ANYmal на очень удаленную от берега морскую электростанцию в Северном море. Работа здесь довольно скучная. Основные функции выполняет автоматика. Но на платформе всегда должны присутствовать 1-2 человека для регулярной проверки работоспособности всех систем и мониторинга различных датчиков и сенсоров. Как вы понимаете, не многие соглашаются на такую должность.
«Важнейшим аспектом для любого энергоснабжающего предприятия является безопасная и постоянная работа всех систем, особенно когда речь идет о производстве энергии на прибрежных электростанциях. Автономные роботы могут предложить должный уровень поддержки при выполнении регулярных и необходимых проверок оборудования и остальной инфраструктуры на таких предприятиях. В рамках первого в мире пилотного проекта оператор системы передачи электроэнергии TenneT решил испытать на одной из крупнейших в мире конвертерных площадок, расположенных в Северном море, четвероногого робота ANYmal».
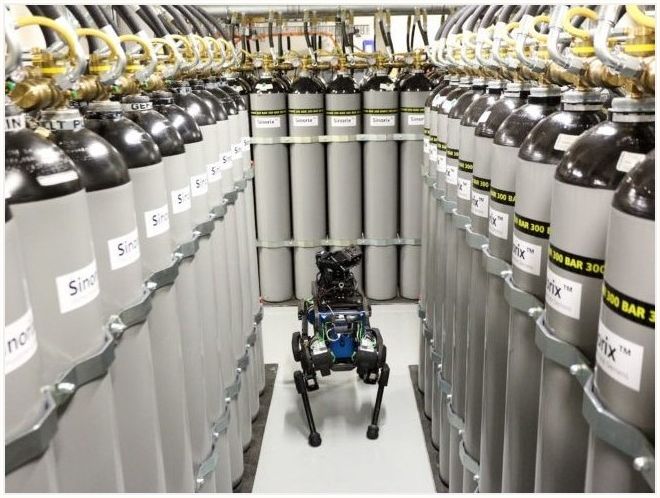
Ознакомившись с видео ниже, вы сразу поймете, почему такие четвероногие роботы как ANYmal практически идеально подходят для выполнения подобных задач. Машине приходится передвигаться по ровной поверхности, изредка поднимаясь и спускаясь по лестницам и протискиваясь в узких местах. В отличии от двуногих человекоподобных роботов, у которых даже при выполнении таких простых задач могли бы возникнуть трудности, конструкция четвероногих роботов позволяет справляться ними без особых усилий. Конечно, можно было бы использовать в таком случае и роботов на гусеничном ходу, но это было бы менее эффективно: там, где гусеничной машине пришлось бы объезжать препятствия, четвероногий робот может их просто переступить.

Несмотря на то, что скорость и эффективность ANYmal находится на должном уровне для выполнения подобных задач, даже такие машины имеют свои недостатки. На том же демонстрационном видео можно отметить некоторые из них. Например, в некоторых случаях злую шутку играют короткие лапы железного четвероного друга – это затрудняет ему обзор для наблюдения за высоко установленными датчиками с помощью камер, расположенными на его корпусе. Кроме того, машина не способна открывать дверцы электрощитков, поэтому сотрудникам станции необходимо оставлять эти объекты открытыми. Но это все мелочи, которые можно легко решить, сделав среду, в которой будет работать машина, более дружелюбной к ней.
Более очевидный недостаток того же ANYmal заключается в другом. Хотя машина без проблем может справиться с ежедневным, монотонным мониторингом и даже сможет своевременно сообщить вам, если что-то пойдет не так, она не способна самостоятельно произвести починку вышедшего из строя оборудования. То есть, даже при использовании таких роботов на предприятиях всегда будут нужны люди для выполнения более сложных технических задач. Робот не способен заменить человека, но способен облегчить ему скучную, ежедневную, монотонную работу.

За комментариями о проекте ANYmal и его испытаниях на морской платформе журналисты научного издания IEEE Spectrum обратились к Питеру Фанхаузеру, соучредителю и коммерческому директору компании ANYbotics, разработавшей данную машину.
Какими специальными возможностями должен обладать ANYmal для работы в подобной среде?
«Использование мобильного робота в реальных индустриальных условиях требует решения ряда сложных задач. Наиболее важным аспектом является наличие у последнего полной автономности и универсальной мобильности, позволяющей проводить работу в больших, комплексных средах с использованием различного контрольно-проверочного оборудования. В целом конструкция робота ANYmal хорошо адаптирована для работы в условиях и средах, создававшихся под человека. Другими словами, он может без проблем передвигаться по всем поверхностям, использовать лестницы и перемещаться через узкие пространства. Компьютерное зрение, а также сенсоры LiDAR позволяют ANYmal ориентироваться в пространстве и составлять план безопасного прохода, через встречающиеся на его пути препятствия. В числе контрольно-проверочного оборудования машина использует обычную оптическую камеру с возможностью увеличения, термическую камеру, а также микрофоны. Все это позволяет собирать детализированную информацию для дальнейшего анализа оператором машины».
Были ли какие-либо сложности при развертывании ANYmal на платформе?
«Благодаря поддержке оператора TenneT (владельца платформы) мы смогли хорошо подготовиться для развертывания ANYmal и убедиться в том, что нас не ждут никакие сюрпризы. Мы детально изучили график задач, с которым роботу предстояло работать, а также провели симуляции с виртуальными планами платформы. В большей степени наши усилия были направлены на соответствие высоким стандартам безопасности для работы на удаленной морской электростанции. Сюда входила недельная подготовка по технике безопасности; тренировка эвакуации с использованием вертолета, разбор сценариев спасения с поверхности воды, а также оснащение нашей полевой команды всеми необходимыми защитными средствами. И, конечно же, мы убедились в том, что взяли с собой все необходимые запасные части для машины, которые могут понадобиться в случае непредвиденных поломок. Все-таки до ближайшего магазина запчастей нас разделяло около 100 километров».
До какой степени, если смотреть реалистично, ANYmal сможет заменить человека?
«Мы до сих пор далеки от возможности имитации человеческой способности адекватно анализировать проблему и использовать различные объекты и инструменты в ее решении. Поэтому, вместо цели по созданию замены реальным рабочим, мы движемся к тому, чтобы создать автоматизированный инструмент помощи. Благодаря таким механизмам можно будет повысить уровень безопасности и эффективности на предприятиях».
Когда ANYmal будет готов для постоянной автономной работы? Что делаете, для достижения этой цели?
«Мы увеличиваем сложность и продолжительность задач по каждому проекту. Следующие шаги в развитии включают возможность мониторинга на дальних дистанциях, а также тестирование зарядных станций для таких роботов. Полностью готовый коммерческий продукт будет представлен в ближайшем будущем».

В решении еще каких задач и в каких сферах, по вашему мнению, будут применяться автономные роботы, подобные ANYmal?
«В настоящий момент мы работаем над несколькими проектами в энергетической и производственной индустрии, а также строительстве, сельском хозяйстве и других более специализированных и общих проектах. Во всех этих областях мобильные роботы могут оказать существенную помощь и поддержку. Работая с ANYmal, мы поняли, что у людей могут быть свои идеи использования подобных машин, о которых мы даже не догадывались, разрабатывая их. В будущем диапазон коммерческих возможностей будет расти вместе с возможностями самих роботов».
Зачем нужны четвероногие роботы Пример ANYmal